Process
INITIAL DESIGN:
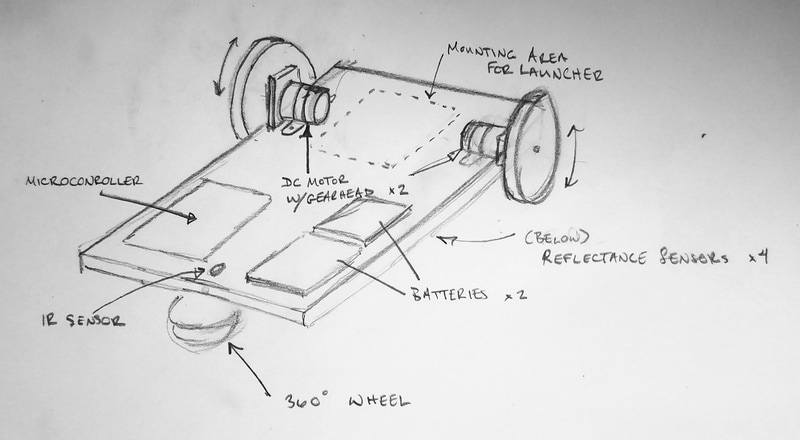
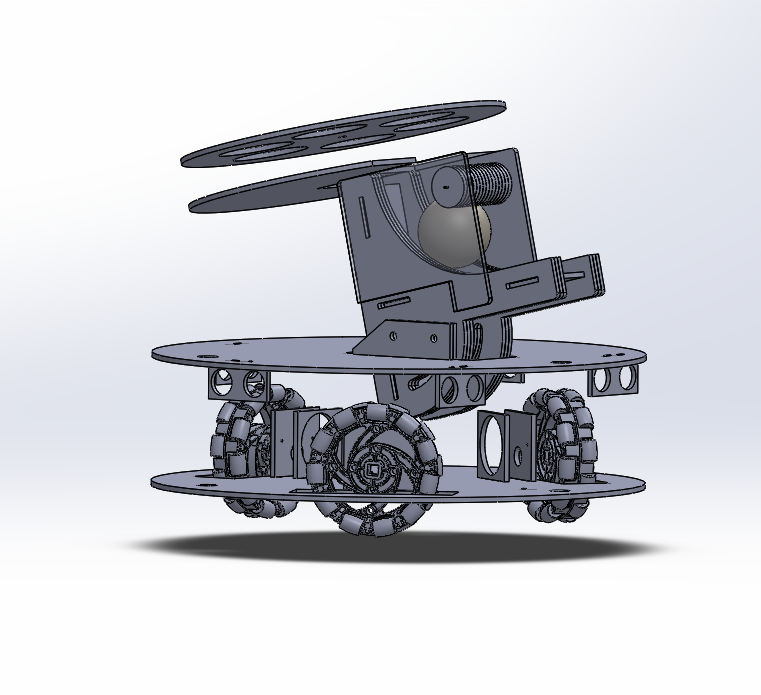
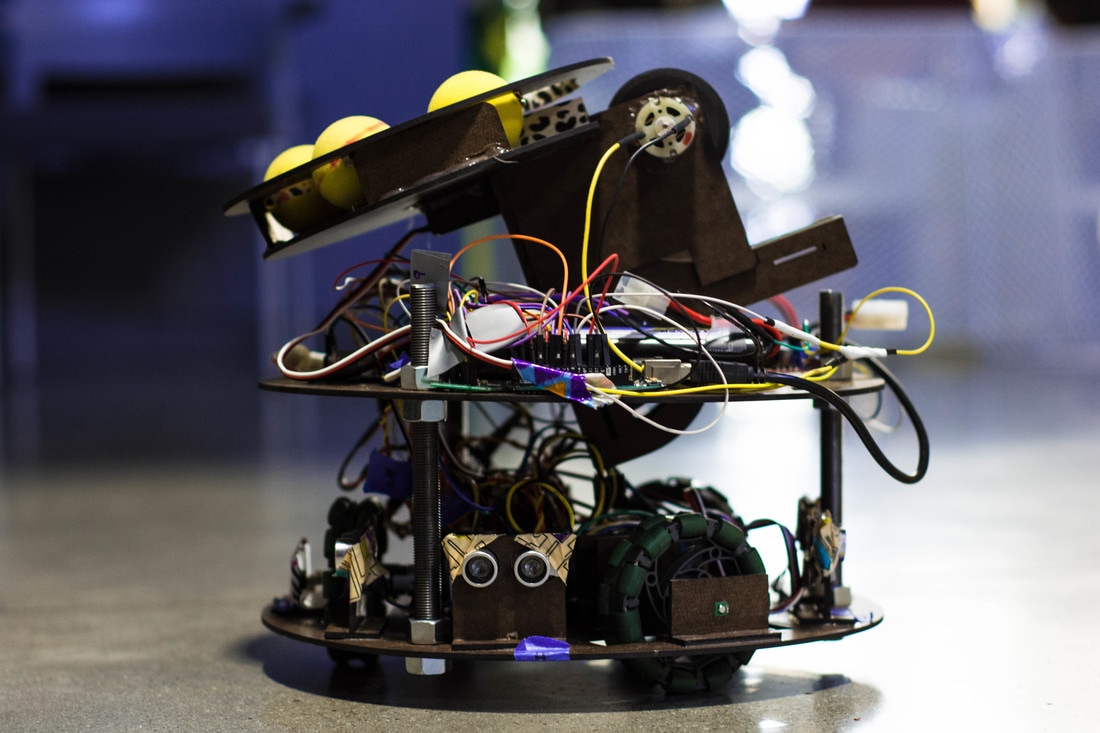
Above: The first rough design used two scooter wheels and a 360 degree wheel. Right Top: After multiple interations and getting advice from previous ME210 teams, we settled on a three omni-wheel design to allow for us to move in any direction while maintaining the same orientation. Right Bottom: After some testing, the final prototype was built. Major differences from the CAD drawing was the use of a foamwheel as a flywheel and placing the ultrasonic sensors on the bottom plate. |
|
|
TESTING THE FORWARD MOTION:
After connecting the motors to drivers, we needed to verify that the motors were powerful and accurate enough to reliably move the robot in any direction we wished. Testing the motors also verified the usefulness of the omni-wheel design. Surprisingly, the robot did not have too much of an issue moving in a straight line. |
|
|
TESTING THE LAUNCHER:
One of the major issues was making a relatively accurate and fast shooter. We decided to use a flywheel design with a rotating cartridge design to store the Nerf balls for launching. We had an issue with the loader jamming because of bad alignment. However the launcher was slightly modified so that the loader worked flawlessly. From testing, we found the flywheel design was rather accurate. The balls all followed a similar trajectory. The discrepancies in ball paths most likely was due to the flywheel being on one side of the launcher and the unknown speed of the flywheel. This could have been solved by finding a way to center mount the flywheel and using an encoder to measure the speed of the motor |
|
|
TESTING PARALLAX:
While there were many methods of finding ways to orient the robot to the wall, we decided to rely on the parallax from two ultrasonic sensors that would face a wall. Whenever the ultrasonic sensors detected a difference in distance between the two sensors, the robot would turn until the difference in distrance between the two sensors is zero. While the sensors were rather accurate to the millimeter, we found that the motors had a hard time adjusting power levels so that the two ultrasonic sensors would read the same value. |
|
|
TESTING LOCATION FINDING:
We decided to use ultrasonic sensors as well to find our location. Ideally, when we start the robot, the robot would orient itself into the correct orientation. From there, we use a coordinate system to specify where the robot should go. Using the ultrasonic sensors, the robot would move until the cooridnate readings are met. While this worked well, one flaw was if there were accidentally any balls in our field, the ultrasonic sensor would be able to detect the ball and mess with our location finding system. |
|
|
BEAT THE BRICK:
This run was to fulfill the requirements of the project. We were to compete against a brick (no one) to activate the Fact Checker and fire at least one Nerf ball into two of the three towers. |
|
POTENTIAL IMPROVEMENTS:
Larger clip for the Nerf balls so that we would not have to return to the safe space as often
A more physical method of aligning the robot (i.e. flat front plate)
Use more sensors so that we do not solely rely on the ultrasonic sensors which can read the wrong value if it detects an unexpected object like a Nerf ball
Larger clip for the Nerf balls so that we would not have to return to the safe space as often
A more physical method of aligning the robot (i.e. flat front plate)
Use more sensors so that we do not solely rely on the ultrasonic sensors which can read the wrong value if it detects an unexpected object like a Nerf ball
